2010 Rover Design Overview

With the 2010 fist place victory, the year has come to a close. A formal design report has been completed discussing every aspect of the design as well as lessons learned along the way. Our team has made this report public in an effort to speed up the development of University Mars Rover designs. We believe that other teams should be able to learn from our mistakes so that they can avoid making similar mistakes in the future. We have also made public a 3D PDF of our CAD model. This is a full 3D rendering that can be opened using Adobe Reader. Click on the thumbnails on the right to download the Design Report or CAD Model.
Chassis
The chassis is designed to keep all six wheels on the ground at all times. The center frame has three pivot points on it, two on either side of the front and one on the back. Each of these pivot points has a hinged set of two wheels attached to it (called a "bogie"). This insures that when driving over uneven terrain, the center pivot of any given bogie maintains the average deflection of the wheel pair, keeping all wheels on the ground while providing an overall smoother ride. The real advantage to this design is that it eliminates the need for any sort of spring suspension to keep the wheels on the ground, allowing for a simpler and more light-weight design (less things to break). Placing the laterally-oriented bogie in the rear provides the driver with a much less cluttered forward field of view.
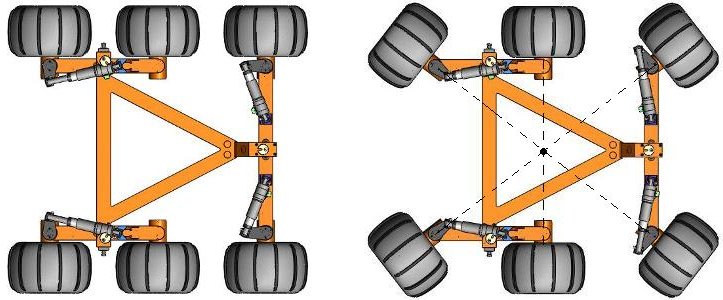
2010 Steering System
In order make the rover more agile over difficult terrain, a set of actuators can change the orientation of the front and rear wheels, rotating them about a vertical axis (a swivel inside the bogie) so that all wheel axes intercept the same point at the center of the rover.
Electrical System
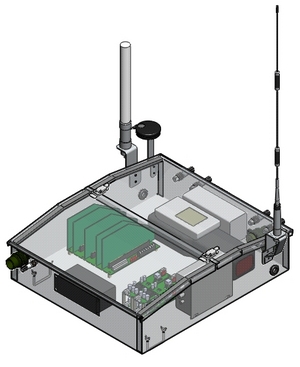
Electrical Housing with Backplane
All electrical modules are on self-contained ISA-style cards. These cards are inserted into a backplane, which reduces the number of wires inside the electrical housing, and makes individual modules easier to remove and replace if necessary. All modules communicate with the central Linux computer over USB, which allows for easier testing of individual modules. A 5 watt, 900MHz analog video transmitter is used to return images from the robot's cameras to the drivers.
Software
The heart of the Mars Rover is an OSWALD handheld Linux computer. This ARM-based handheld runs a complete Linux system, and our custom control software. Commands are received by the control software over the wireless serial datastream, and sent to the appropriate module to control the hardware. Building on top of a complete Linux operating system allows us to more easily write and test our code, since we can run the entire system on a laptop computer.