Rover News

We have completed our second weekend of testing. We are happy to say that our video system is working tremendously well. We were able to travel hundreds of yards away on the opposite side of a hill and a grove of trees, without significant loss of signal integrity. Additionally, we now have every single one of our sponsor logos on the rover, without our sponsors, our team would not exist!
The robotic arm has been finished, and performs amazingly well! We have put together a video demonstrating that it meets all of the requirements to successfully compete in the competition (see video page).
As planned we have achieved our most important deadline yet: a wireless and driving rover by the end of spring break. We have put together a nice video of our first weekend of wireless testing (also on the video page). As expected, not everything worked perfectly, but this is why we have budgeted ten weeks for testing and upgrading. Some of the major problems that arose were too little range on the data transmission radios, and a short-circuit on of our boards that was causing the rover to periodically reset its primary controller. These items have now been addressed and will be tested again during the next test drive this weekend. Furthermore we have been working on making the rover more reliable by using wire-lockable fasteners, built in safety features in the drive software, and improving the weather-proofing by housing external circuit boards inside waterproof housings.

There has been a lot of build progress in the last few weeks! Currently we are near completion of the chassis; the carbon fiber frame has been assembled and the welding operations are complete. This week we have begun the last machining operations on the welded parts; this will be completed next week. These machining operations are very tedious as there are already hundreds of hours of work in these parts. The arm has also seen a great deal of progress since the last update. The arm is by far the most complicated part of this rover, as it is composed of well over 50 machined parts and requires many complicated machining operations. Some of our members are spending 8 hours a day in the machine shop! See the attached images of all our in-house machined parts. All machining was performed by members on our team.
Our electrical team has also been very busy, we have completed prototypes of the primary control board, the camera interface board (see pictures), and are expecting our complete video amplifier boards to arrive this upcoming week. The motor control boards are also complete and are working very well. Our software team has completed a very impressive user interface prototype a few weeks ago and many suggestions were made so that it can streamline our competition tasks. Currently we have coordinate triangulation assistance capabilities, rover system status feedback, and a representation of the rover's orientation so that we are more aware of its orientation relative to gravity. Much more functionality will be added in the coming weeks.
We also have a science team that has been doing a lot of background research and has built an incubator to grow cyanobacteria in the upper layer of the soil. The competition requires us to locate these bacteria and return a sample to base, our science team is invaluable to accomplishing this task, as has proven very competent during last year's competition, scoring 100/100 points for the sample return mission.
As it currently stands, we expect to have the preliminary build of the arm complete in two weeks, as well as a complete rolling chassis. We intend to wire the motors up directly from the individual motor control boards to a handheld control box. It will not be wireless at this time, but we do this so that we can start putting the rover through its paces. Our next upcoming public event is an OSU Alumni Awards night. We plan on attending with the new rover; this will likely be its first public debut.
The mechanical design for the rover is complete and machining has been underway for some time now. All welding has been completed and the final machining operations will take place next week, all performed by our own team members at our university.
The electrical designs for most of the systems are complete and PCB's have been ordered. The universal motor drivers that are going to control our six drive motors and six linear actuators have passed through multiple iterations of design and testing; the final iteration is expected to arrive next week. These controllers are designed by our team and are capable of precise speed control and have current limiting capability to prevent motor burn-outs at stall conditions. Our own custom video transmission amplifier design is near completion; the PCBs will be ordered this week.
Our software team has been working on the communications between the individual rover systems (arm, motors, cameras, GPS, etc) as well as the user interface that will allow the operator to efficiently control the rover with all relevant information clearly displayed.
We have a separate team working on the rover's arm. This team is composed of two senior project teams, one mechanical which has just completed the mechanical design of the arm, and one electrical, which has completed design of most of the electrical systems responsible for controlling the arm. Both of these teams will begin building their systems and will have completed systems by the end of March.

The team was asked by the OSU Foundaton to attend the 2010 Oregon State University President's Dinner, at which OSU's most generous donors ($1,000,000 and more) were honered. The rover was tasked with delivering letters of thanks to the recipients by towing a small trailer with the letters onto the main stage, The rover remained on stage for the remainder of the evening.
On August 4th the Team traveled to Dayton, Ohio to attend the 13th annual International Mars Society Convention. Team members attended a variety of presentations ranging from the viability of sending humans to mars with current technology, to an overview of NASA's Cassini Program. The team also presented a summary of the 2010 Mars Rover, including in-competition video from the rover's point of view. A great deal was learned and we would like to thank Kevin Sloan for making it possible for us to attend the convention.

The Oregon State University placed 1st in the University Rover Challenge this weekend! Out of 400 points, we scored 315 (106 points ahead of 2nd place!). We were the only team to find the astronaut and did so in only 3.5 minutes! This is the third year the Rover Team has competed in the competition, and the second year we have won 1st place! Thank you to all our sponsors and supporters who made our rover and team possible.
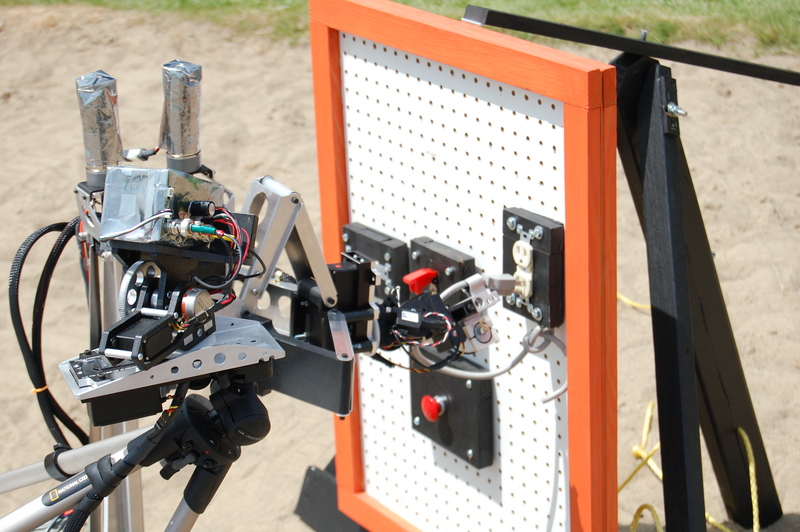
In preparation for the competition, the team ran through each of the four scenarios within the prescribed time limit in a competition rehearsal to determine what still needs improvement. The arm worked beautifully and was able to insert the plug into the outlet as required, as well as push buttons and flip switches. The astronaut was found in just a few minutes, and soil samples were returned. There were a few problems with the navigation software at the base station that prevented us from completing the site & survey task, so those are being worked on this week.
With zero problems or surprises on the rover, a barbecue, and great weather, it turned out to be a great day for the public to see their local Mars Rover in operational condition! Check out the pictures of the rehearsal here.
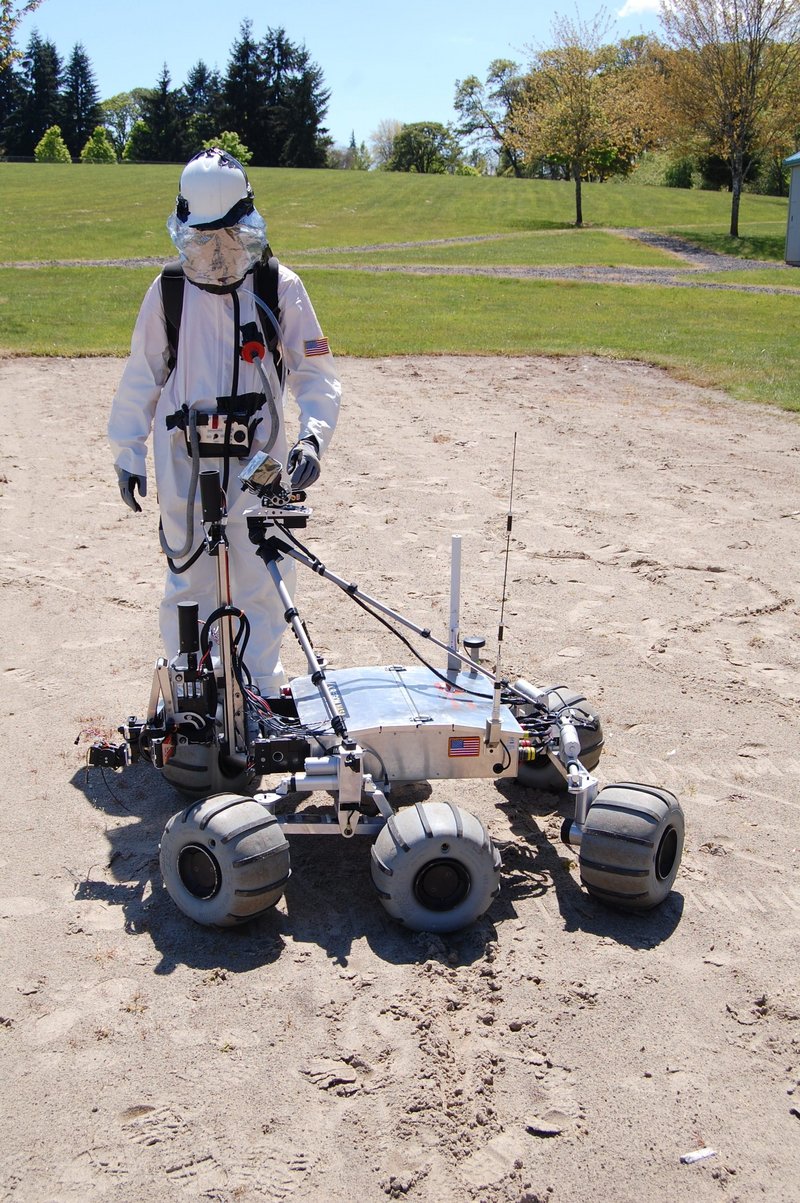
The first long-range tests we performed this weekend at Adair County Park, North of Corvallis. One of our team members played the role of the distressed astronaut in need of oxygen to practice this scenario for the competition. Using the new long-range camera, we were able to spot him from a great distance lying in tall grass. The rover operated without problems from up to 1/4 mile away from the command station. In addition to providing the team with more practice, Scylla also introduced the local youth to science and engineering.

The rover was asked to star in a publicity stunt for the university by driving over the entire OSU Football Team. In all, we drove over 86 people, including 81 football players, 2 coaches (including head coach Mike Riley), and several by-standers! It was a great opportunity to test our rover's ability to navigate uneven terrain, and a lot of fun!
Check out the photos and videos (rover's perspective and by-stander perspective) from the event.

Scylla now has treaded tires that can be swapped in place of the slicks when tough terrain is expected. We took Scylla for a drive in the forest to test the effectiveness of the new tread and found that she has no problem with logs and bushes. Scylla was under continuous control from roughtly 100 yards away, and was controlled using the primary camera on the tripod.

Many long hours and late nights in the past week have finally paid off: Scylla has a fully functional arm and is now under wireless control! To test the range of the wireless control, and other complexities that come with controlling a remote operated vehicle, the team traveled to Gilchrist, OR to test the rover in conditions very similar to those at the competition site in Hanksville, UT. The trip was a great success: a lot was learned that will be worked on in the coming weeks. Pictures of the trip can be seen here.

The OSU Mars Rover, now named Scylla, attended the FIRST Robotics Competition in Portland, Oregon, a High School Robotics Competition similar to the FIRST Tech Challenge. Once again the Rover provided great interest and entertainment for all the attending teams. More pictures of the event can be seen here.

Yesterday at the OSU FIRST Tech Challenge Qualifying Tournament, our rover drove over 32 high school students!
We mounted a digital camera to the tripod on the rover to get an idea of what it will be like to drive around remotely. The camera was very stable and offered a great view.

The motors and controllers were installed last week, breathing life into the rover for the first time! This was done in preparation for the OMSI Space Gala, a space-themed fundraising event for the Oregon Museum of Science and Industry. The rover was hardwired to a control box that allowed the driver to control the speed and steering functions manually.
The previous years' rovers were also brought along to show the team's progression.
This was the first public appearance of our new rover and it was a huge success! Multiple all-terrain demonstrations were given by driving the rover onto an obstacle built for this exact purpose. More thorough and amusing demonstrations were given by driving the rover over the team members all lying next to one-another on the floor, providing great entertainment for the guests!
See more photos in our photo gallery.

The mechanical team has finished machining parts and has fully assembled our chassis. The chssis has demonstrated its ability to navigate highly uneven terrain while remaining a very stable camera platform.
See more photos in our photo gallery.